
admin2021-04-26 3188 0
多(duō)智能(néng)體(tǐ)協同控制系統即多(duō)個智能(néng)體(tǐ)組成的集合,它的目标是将大而複雜的 系統集成設成小(xiǎo)的、彼此互相通信和協調的、易于管理(lǐ)的系統。多(duō)智能(néng)體(tǐ)協同控 制系統在表達實際系統時,通過各智能(néng)體(tǐ)間的通訊、合作(zuò)、互解、協調、調度、 管理(lǐ)及控制來表達系統的機構、功能(néng)及行為(wèi)特性。
多(duō)智能(néng)體(tǐ)系統控制具(jù)有(yǒu)自主性、分(fēn)布性、協調性,并具(jù)有(yǒu)自組織能(néng)力、學(xué)習 能(néng)力和推理(lǐ)能(néng)力。采用(yòng)多(duō)智能(néng)體(tǐ)協同控制系統解決實際應用(yòng)問題,具(jù)有(yǒu)很(hěn)強的魯 棒性和可(kě)靠性,并具(jù)有(yǒu)較高的問題求解效率。
多(duō)智能(néng)體(tǐ)協同控制系統是智能(néng)體(tǐ)技(jì )術應用(yòng)及研究的一個質(zhì)的飛躍,不同行業 的專家學(xué)者對之進行了深入的研究并從多(duō)個角度闡述了多(duō)智能(néng)體(tǐ)系統用(yòng)于解決 實際問題的優勢,歸納起來,主要有(yǒu)以下幾點:
1、在多(duō)智能(néng)體(tǐ)協同控制系統中(zhōng),每個智能(néng)體(tǐ)具(jù)有(yǒu)獨立性和自主性,能(néng)夠解決給 定的子問題,自主地推理(lǐ)和規劃并選擇适當的策略,并以特定的方式影響環 境;
2、多(duō)智能(néng)體(tǐ)協同控制系統支持分(fēn)布式應用(yòng),所以要具(jù)有(yǒu)良好的模塊性、易于擴 展性和設計靈活簡單,克服了建設一個龐大的系統所造成的管理(lǐ)和擴展的困 難,應有(yǒu)效降低系統的總成本;
3、在多(duō)智能(néng)體(tǐ)協同控制系統實現過程中(zhōng),不追求單個龐大複雜的體(tǐ)系,而是按 面向對象的方法構造多(duō)層次、多(duō)元化的“狼蜂”智能(néng)體(tǐ),要降低系統的複雜 性,也要降低各智能(néng)體(tǐ)問題求解的複雜性;
4、多(duō)智能(néng)體(tǐ)協同控制系統是一個講究協調的系統,各智能(néng)體(tǐ)通過互相協調去解 決大規模的複雜問題;“狼蜂”智能(néng)體(tǐ)空地一體(tǐ)系統多(duō)智能(néng)體(tǐ)協同控制系統也 是一個集成系統,它采用(yòng)信息集成技(jì )術,将各子系統的信息集成在一起,完 成複雜系統的集成;
5、在多(duō)智能(néng)體(tǐ)協同控制系統中(zhōng),各智能(néng)體(tǐ)之間互相通信,彼此協調,并行地求 解問題,因此能(néng)有(yǒu)效地提高問題求解的能(néng)力。
多(duō)智能(néng)體(tǐ)協同控制系統是在多(duō)無人車(chē)、無人機運動中(zhōng),各個無人車(chē)及無人機 之間能(néng)夠保持一定的相對距離,并在速度及位置上按照預設路線(xiàn)或命令進行運動 的過程。基于 MATLAB/Simulink 進行硬件在環控制算法開發和驗證,可(kě)通過 MATLAB/Simulink 軟件直接獲取高精(jīng)度的姿态數據和圖像數據,并提供多(duō)無人車(chē)、 無人機協同控制的 OEMO 程序。

● 室内定位系統:采用(yòng)室内光學(xué)動捕技(jì )術,定位範圍 6m*6m,支持亞毫米級定 位,能(néng)夠最多(duō)同時捕捉 12 架左右的無人車(chē)或無人機;
● 被控制對象:2 台無人車(chē)及 4 架無人機進行編隊。
● 無人機飛控:無人機 STM32F427(180MHZ)主控及 STM32F100 協處理(lǐ)器,内 置三組 IMU 冗餘設計,外置 GPS 和光流模塊,支持 TCP/UDP 通訊協議。
● 視覺導航:256 顆 CUDA 核心,CPU 選用(yòng) Quad ARM A57,4G 内存,16G 存儲, 要擁有(yǒu)豐富的外設資源和強大的運算能(néng)力。
● 無人車(chē)控制器:需配置 NVIDIA TX2 主闆,打在激光雷達和視覺傳感器與識 别 SDK,能(néng)夠進行 SLAM 建模和圖像跟蹤。
● 基礎開發平台:可(kě)在 MATLAB/Simulink 軟件平台進行控制算法研究,支持自 動生成代碼,通過無線(xiàn) WiFi 下載到無人車(chē)控制闆和無人機飛控闆。
● 擴展開發語言:支持 C、C++、Python 編程,适合有(yǒu)一定代碼開發能(néng)力的學(xué) 生,進一步錘煉代碼編程能(néng)力;
● 基于模型(MBD)的設計:MATLAB/Simulink 中(zhōng)提供了 ROS 的支持包,可(kě)試 驗 Simulink 控制模型到 ROS 系統代碼的自動生成,降低了 ROS 系統控制模型的 開發難度,适合大衆化本科(kē)教學(xué)實驗;
● 可(kě)用(yòng)于無人系統的動态建模和控制研究、運動規劃、避障控制、多(duō)信息融 合、編隊控制、多(duō)智能(néng)體(tǐ)協同控制、無人系統自主控制、足型機器人步态分(fēn)析等。
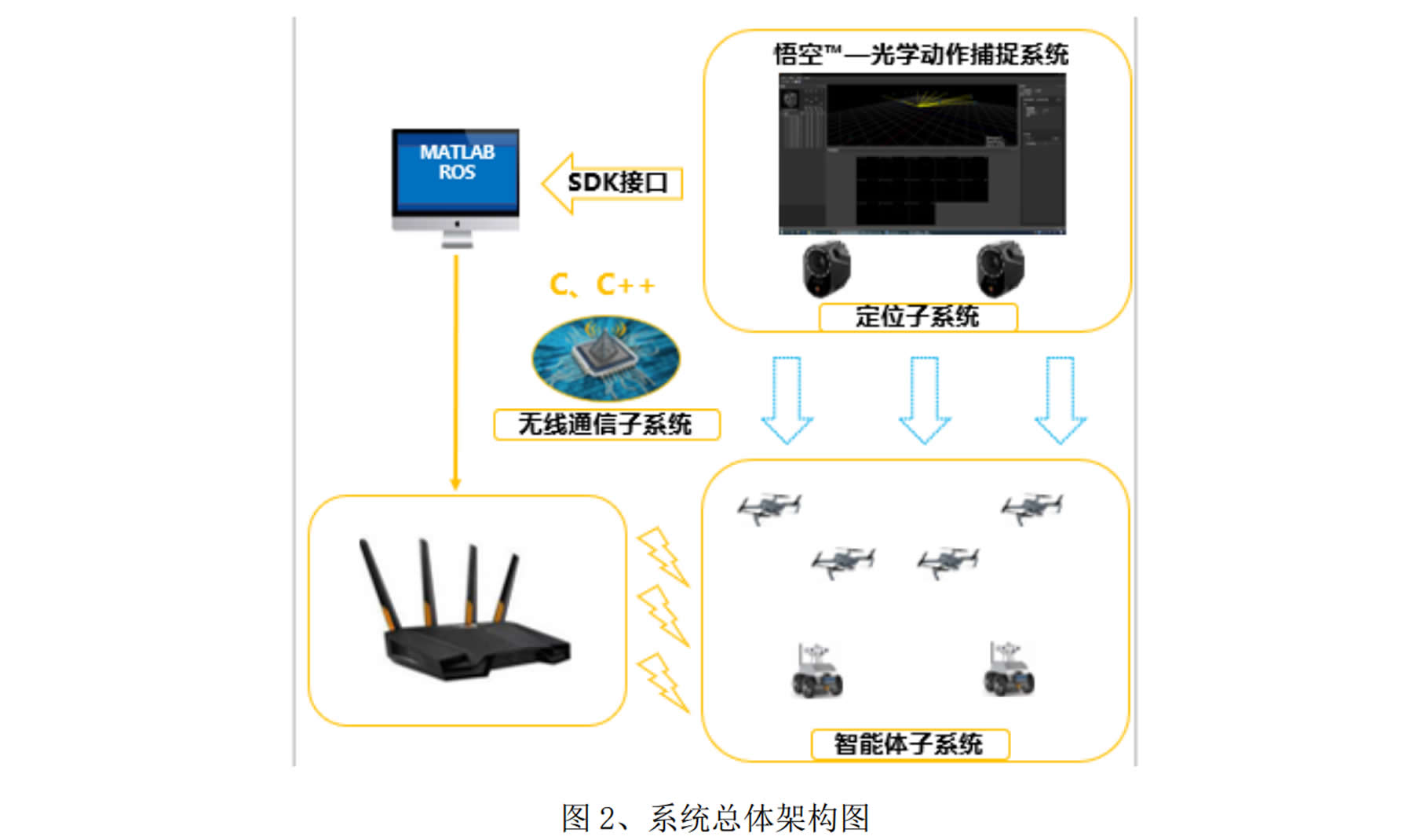
多(duō)智能(néng)體(tǐ)協同控制系統包括實時定位系統、實時控制系統、多(duō)智能(néng)體(tǐ)協同控 制系統,以及與之配套的無線(xiàn)網絡通信裝(zhuāng)置。 實時定位系統采用(yòng)光學(xué)動捕技(jì )術,主要由紅外光學(xué)動作(zuò)捕捉鏡頭、操作(zuò)及 分(fēn)析處理(lǐ)軟件和配件組成,可(kě)捕捉輸出智能(néng)體(tǐ)精(jīng)準的三維空間數據,系統精(jīng)度 可(kě)達亞毫米級。
實時控制系統是一台高性能(néng)台式服務(wù)器,運行 Windows7 以上操作(zuò)系統,部 署用(yòng)于圖像處理(lǐ)、定位跟蹤、算法開發、模型編譯下載以及進行數據堅實分(fēn)析 的軟件,可(kě)同時作(zuò)為(wèi)開發主機和 Windows 目标機使用(yòng)。 多(duō)智能(néng)體(tǐ)協同控制系統是指在上位機 MATLAB/Simulink 軟件平台上進行控 制算法開發,通過無線(xiàn)通信完成對若幹無人車(chē)、無人機的集群協同控制。
多(duō)智能(néng)體(tǐ)協同控制系統實驗平台的實驗室布置主要包括人機操作(zuò)區(qū)和設備 實驗區(qū),具(jù)體(tǐ)如下圖所示:
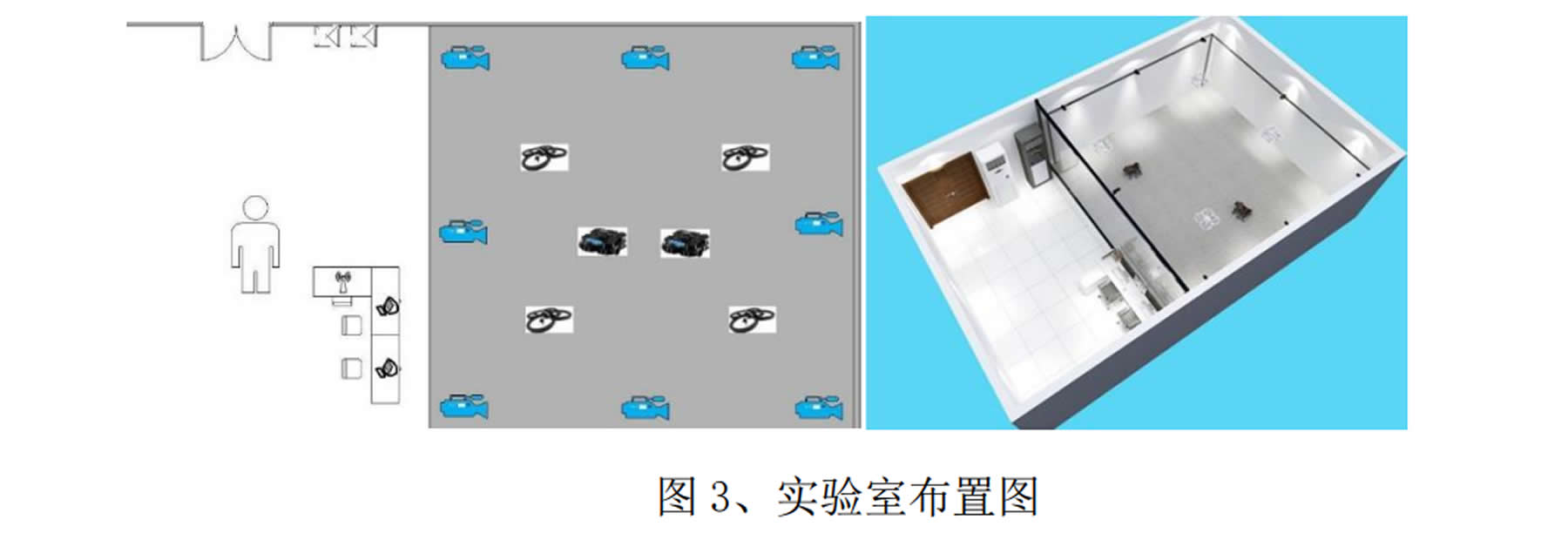
● 人機操作(zuò)區(qū):該區(qū)域主要用(yòng)于研究人員進行上位機操作(zuò)開發,可(kě)在該區(qū)域控 制和觀察實驗設備區(qū)内的實驗對象,主要設備包括卓翼、上位機、路由器及 必要的實驗設施。
● 設備實驗區(qū):該區(qū)域主要用(yòng)來進行圖像獲取、無人車(chē)及無人機的編隊控制實 驗,進行實驗時實驗人員禁止進入,主要有(yǒu) 8 台攝像頭、2 台無人車(chē)、4 架 無人機以及必要的保護設施。
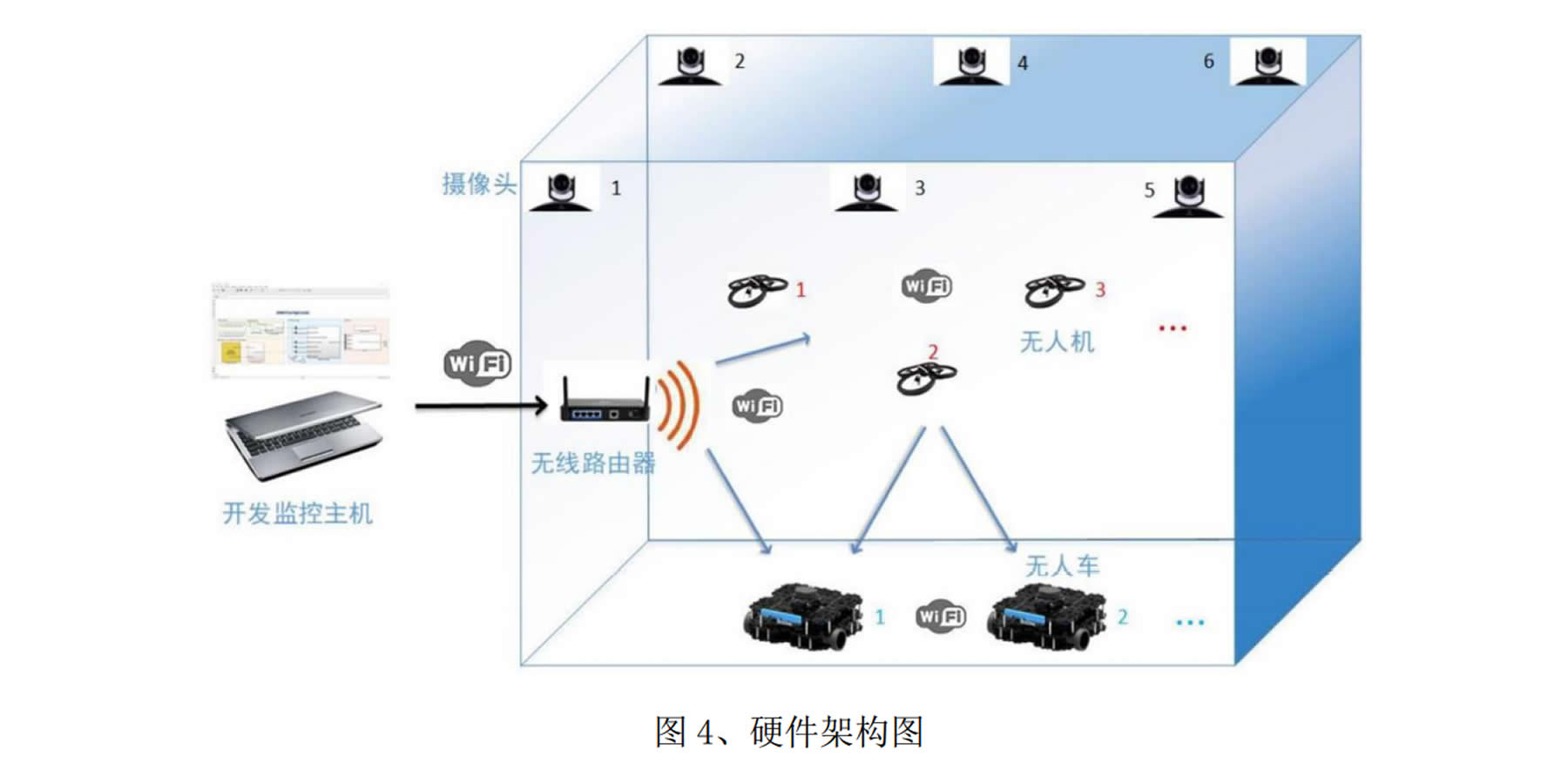
上圖為(wèi)平台系統硬件構成圖,主要包括如下:
1、實時定位系統通過多(duō)個攝像頭完成無人車(chē)、無人機的圖形采集,将采集到的 數據進行處理(lǐ)分(fēn)析獲得無人車(chē)、無人機精(jīng)确的位置和姿态信息,并将處理(lǐ)結 果發送給開發主機。
2、實時控制系統開發主機主要完成算法開發和 Windows 實時目标機功能(néng):算法 開發主要基于 MATLAB/Simulink 實現,結合實時控制軟件,可(kě)實現代碼生 成、編譯和部署;開發主機可(kě)作(zuò)為(wèi) Windows 實時目标機,運行 Simulink 生 成的 Windows Target 目标代碼。
3、多(duō)智能(néng)體(tǐ)協同控制系統包括若幹無人車(chē)、無人機,每個無人車(chē)、無人機上安(ān) 裝(zhuāng)高性能(néng)計算單元和外圍傳感器,兼容 MATLAB/Simulink,能(néng)夠基于 MATLAB/Simulink 進行控制器開放式硬件,實現多(duō)智能(néng)體(tǐ)協同控制、視覺 SLAM 等複雜算法研究。
備注:為(wèi)保障實驗、學(xué)習人員的安(ān)全,進行編隊控制、控制開發、步态分(fēn)析、 運動規劃等實驗時,實驗、學(xué)習人員智能(néng)在開發主機端操作(zuò),不可(kě)進入編隊活 動工(gōng)作(zuò)區(qū)域,确認無人機、無人機車(chē)、足型機器人停止後才能(néng)到工(gōng)作(zuò)目标工(gōng) 作(zuò)、連接線(xiàn)纜、調試設備等操作(zuò)。
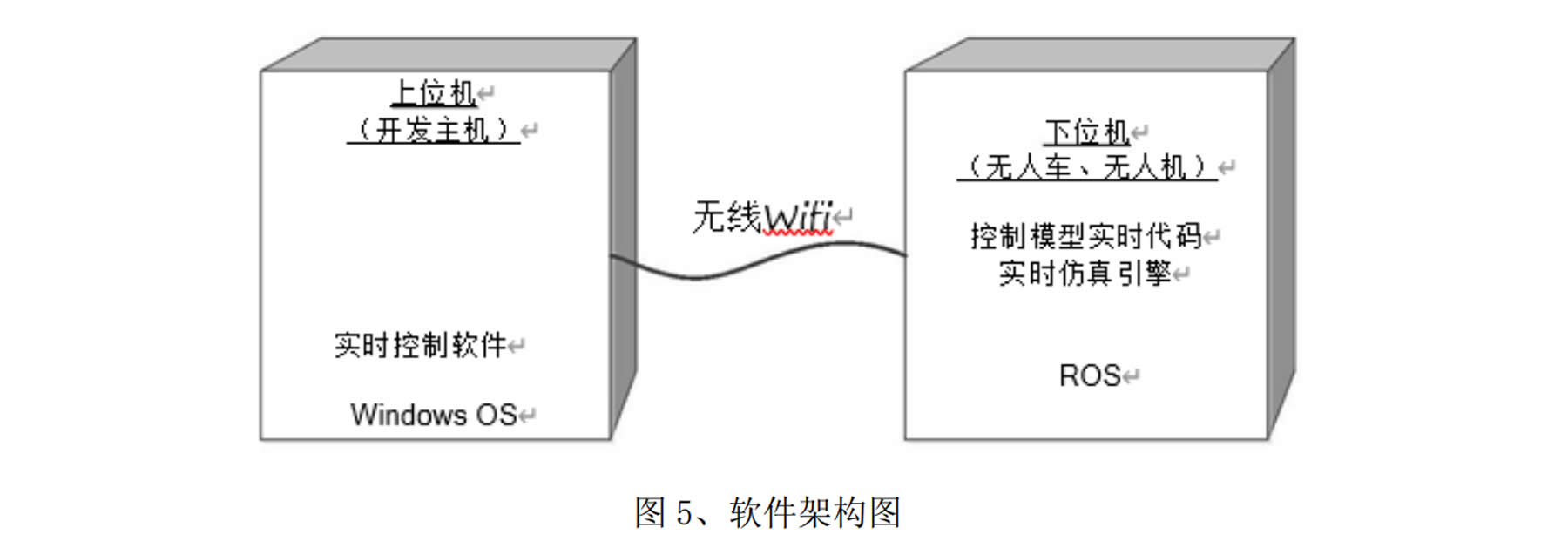
系統軟件分(fēn)為(wèi)“上-下位機”兩部分(fēn),主要包括:
1、上位機軟件:基于 Windows 操作(zuò)系統個,提供圖像定位處理(lǐ)的軟件、ROS 實 時示例軟件、地面站軟件、實時控制軟件;
2、下位機軟件:基于 ROS 系統,提供無人車(chē)/無人機控制闆的硬件驅動、實時仿真引擎以及控制模型實時代碼。
更多(duō)内容……(略)
地址:廣西桂林市七星區(qū)高新(xīn)區(qū)信息産(chǎn)業園創新(xīn)大廈A座C301号

